@article{Piazza2026_FB,author={Piazza, Mattia and Piccinini, Mattia and Taddei, Sebastiano and Biral, Francesco and Berolazzi, Enrico},journal={IEEE Robotics and Automation Letters},title={Real-Time Velocity Profile Optimization for Time-Optimal Maneuvering With Generic Acceleration Constraints},year={2026},volume={11},number={2},pages={1674-1681},doi={10.1109/LRA.2025.3643297},dimensions={true},}
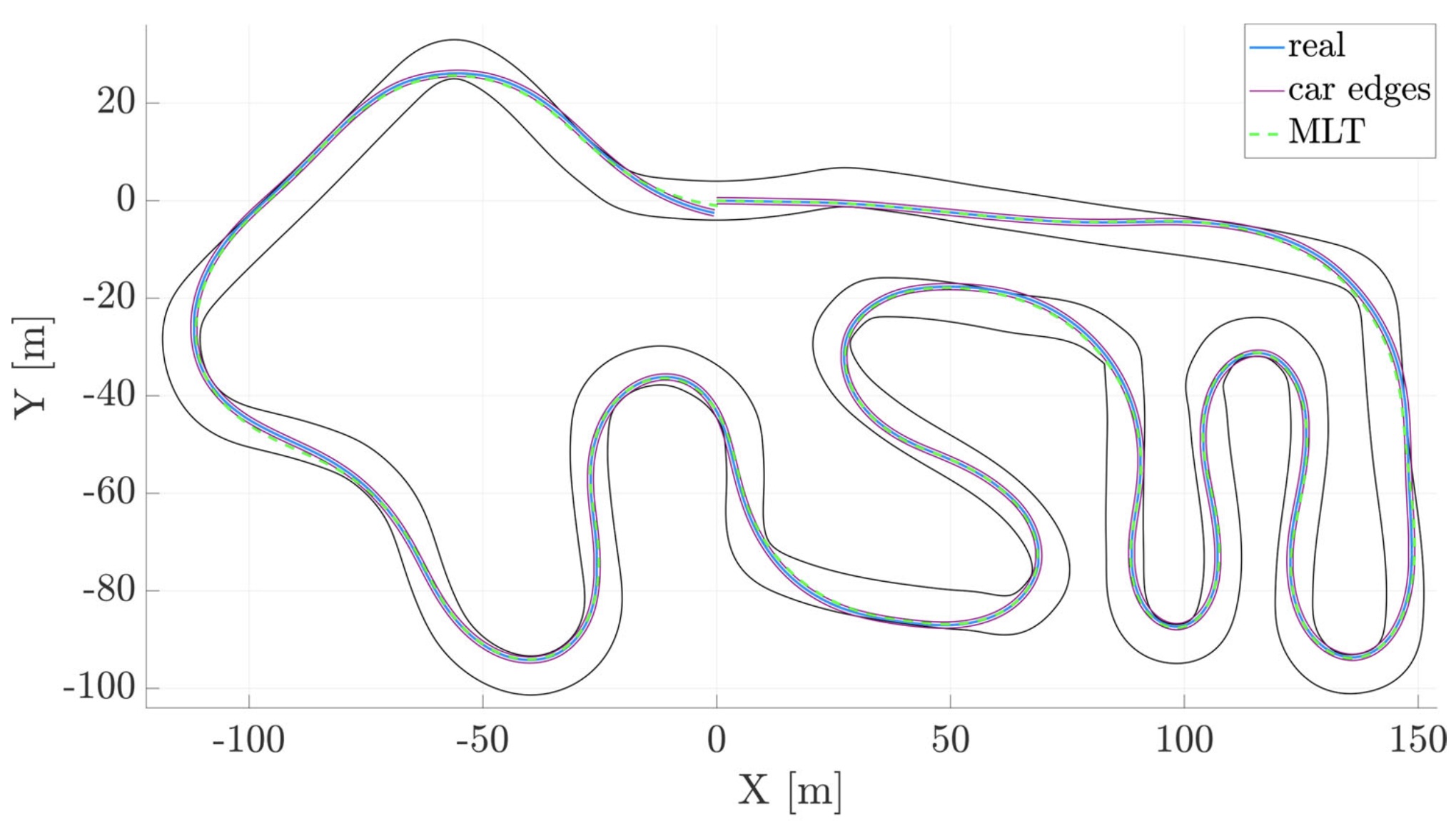
A Multi-Stage Time-Variant Motion Planner for Agile Autonomous Driving Maneuvers
Alexander Langmann, Stefan Kohl, Levent Ögretmen, and 2 more authors
IEEE Open Journal of Intelligent Transportation Systems, 2026
@article{Langmann2026,author={Langmann, Alexander and Kohl, Stefan and Ögretmen, Levent and Piccinini, Mattia and Betz, Johannes},title={A Multi-Stage Time-Variant Motion Planner for Agile Autonomous Driving Maneuvers},journal={IEEE Open Journal of Intelligent Transportation Systems},year={2026},note={under review},}
Differentiable Weights-Varying Nonlinear MPC via Gradient-Based Policy Learning: An Autonomous Vehicle Guidance Example
Felix Jahncke, Baha Zarrouki, Mattia Piccinini, and 4 more authors
@article{Jahncke2026_diffMPC,author={Jahncke, Felix and Zarrouki, Baha and Piccinini, Mattia and D'sa, Jovin and Isele, David and Bae, Sangjae and Betz, Johannes},journal={IEEE Robotics and Automation Letters},title={Differentiable Weights-Varying Nonlinear MPC via Gradient-Based Policy Learning: An Autonomous Vehicle Guidance Example},year={2026},volume={11},number={3},pages={3724-3731},doi={10.1109/LRA.2026.3662644},dimensions={true},}
@article{Li2026,author={{Z. Li, B. Zhou, C. Hu, M. Piccinini, B. Zarrouki, R. Mengharam, and L. Xie}},title={EVO-MPCC: Enhanced Velocity Optimizationwith Learning-Based
Auto-Tuning for Real-Time Vehicle Trajectory Planning},journal={Robotics and Autonomous Systems},year={2026},note={under review},}
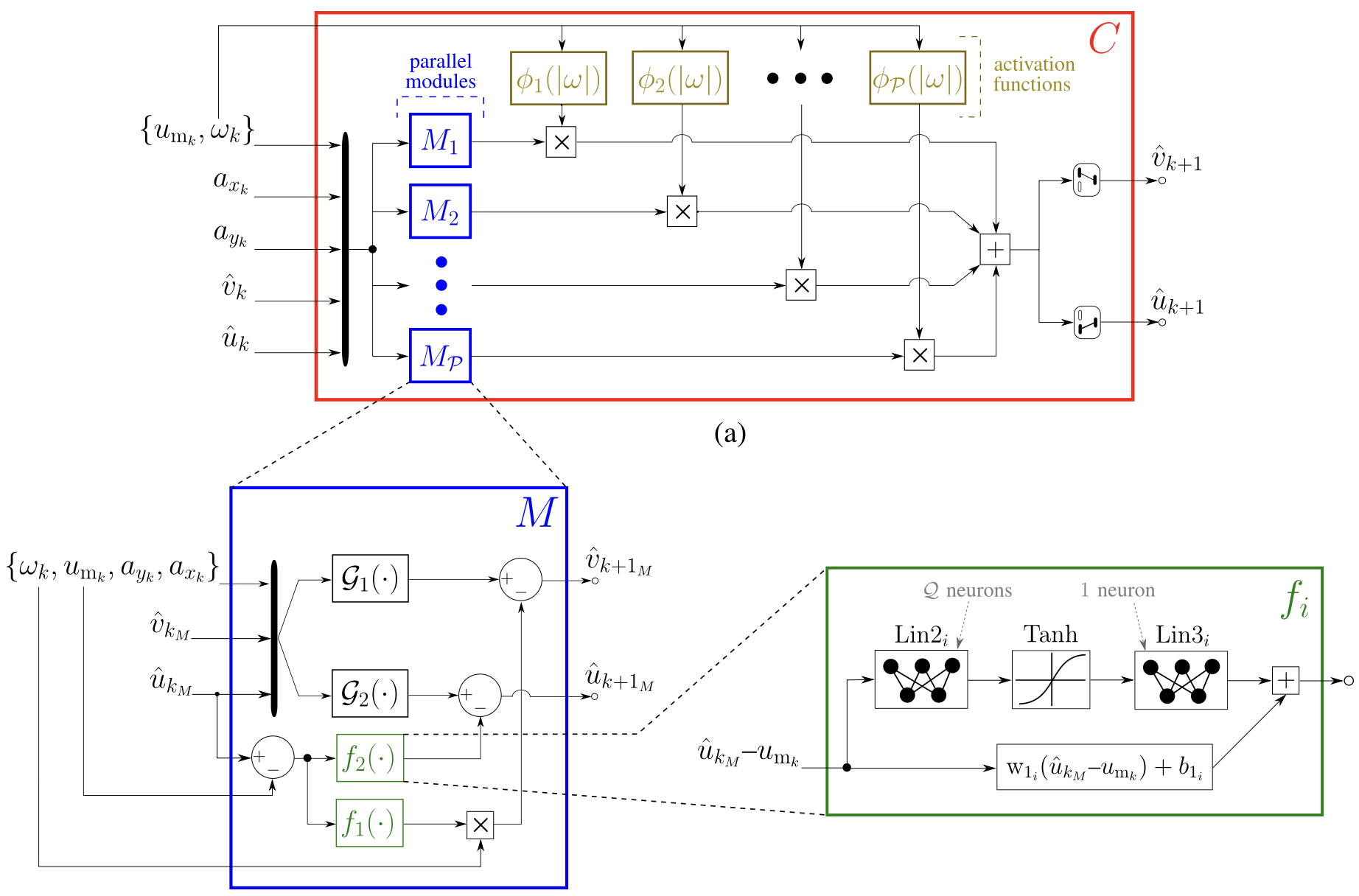
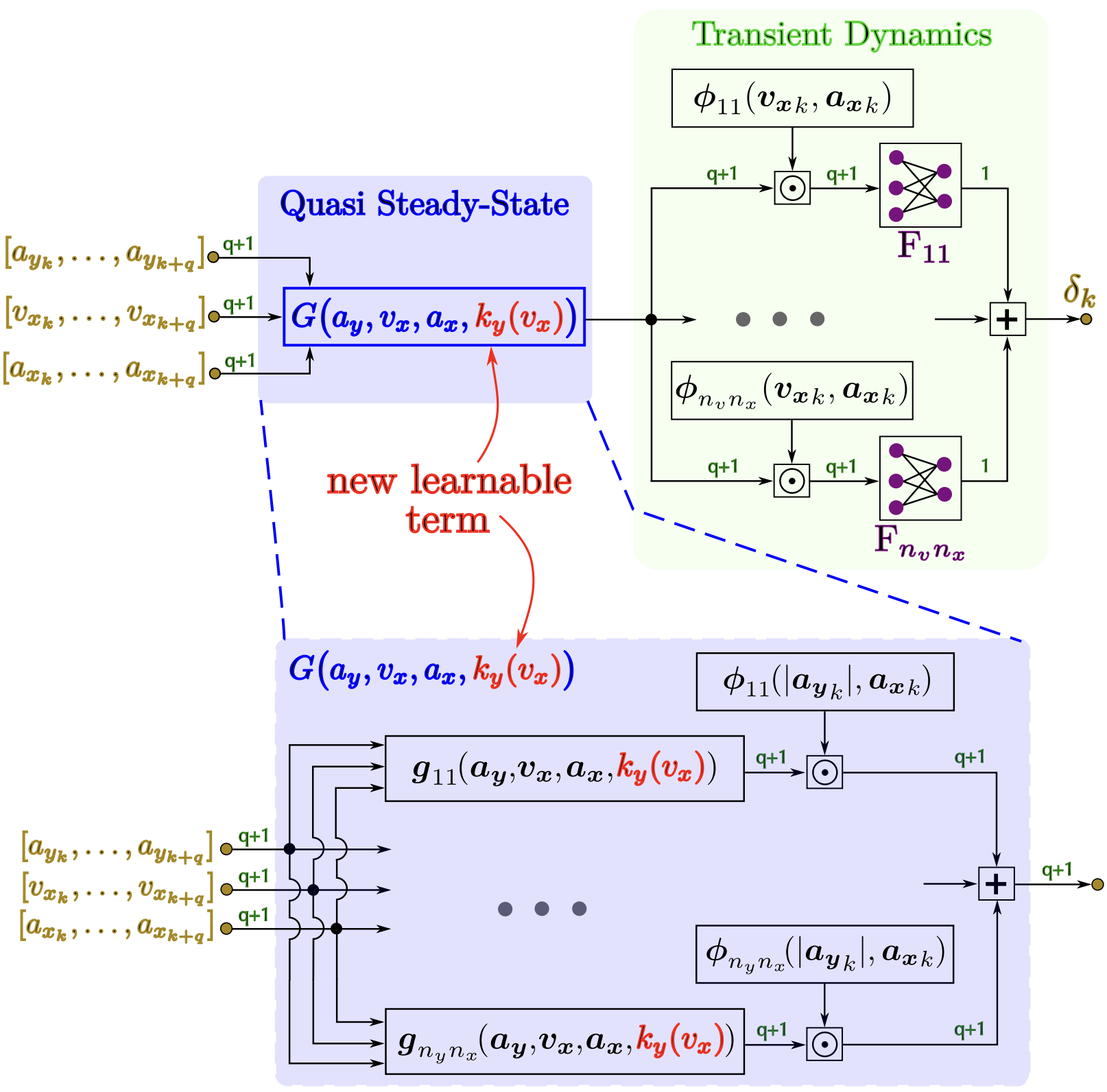
Model-Structured Neural Networks for Vehicle Dynamics Learning Near the Limits
A. Mungiello, F. Jahncke, S. Santini, J. Betz, G. P. R. Papini, and M. Piccinini
IEEE Open Journal of Intelligent Transportation Systems, 2026
@article{Mungiello2026,author={{A. Mungiello, F. Jahncke, S. Santini, J. Betz, G. P. R. Papini, and M. Piccinini}},title={Model-Structured Neural Networks for Vehicle Dynamics Learning
Near the Limits},journal={IEEE Open Journal of Intelligent Transportation Systems},year={2026},note={under review},}
Foundation Models in Autonomous Driving: A Survey on Scenario Generation and Scenario Analysis
Yuan Gao, Mattia Piccinini, Yuchen Zhang, and 12 more authors
IEEE Open Journal of Intelligent Transportation Systems, 2026
@article{Gao2025survey,author={Gao, Yuan and Piccinini, Mattia and Zhang, Yuchen and Wang, Dingrui and Moller, Korbinian and Brusnicki, Roberto and Zarrouki, Baha and Gambi, Alessio and Totz, Jan Frederik and Storms, Kai and Peters, Steven and Stocco, Andrea and Alrifaee, Bassam and Pavone, Marco and Betz, Johannes},journal={IEEE Open Journal of Intelligent Transportation Systems},title={Foundation Models in Autonomous Driving: A Survey on Scenario Generation and Scenario Analysis},year={2026},volume={},number={},pages={1-1},doi={10.1109/OJITS.2026.3660686},}
Extrospective Prediction for Autonomous Driving in Emergency Cut-in Scenarios
D. Wang, R. Brusnicki, Z. Lai, Y. Wu, M. Piccinini, R. Yang, W. Li, and J. Betz
IEEE Transactions on Intelligent Transportation Systems, 2026
@article{Wang2026,author={{D. Wang, R. Brusnicki, Z. Lai, Y. Wu, M. Piccinini, R. Yang, W. Li, and J. Betz}},title={Extrospective
Prediction for Autonomous Driving in Emergency Cut-in Scenarios},journal={IEEE Transactions on
Intelligent Transportation Systems},year={2026},note={under review},}
Multidirectional Gaussian-Process Tire Models for Kalman Filtering in Vehicle Dynamics State Estimation
S. Goblirsch, M. Piccinini, J. Betz, and M. Lienkamp
@article{Goblirsch2026,author={{S. Goblirsch, M. Piccinini, J. Betz, and M. Lienkamp}},title={Multidirectional Gaussian-Process Tire Models for Kalman Filtering in Vehicle Dynamics State Estimation},journal={Vehicle System Dynamics},year={2026},note={under review},}
2025
Safe Reinforcement Learning with a Predictive Safety Filter for Motion Planning and Control: A Drifting Vehicle Example
Bei Zhou, Baha Zarrouki, Mattia Piccinini, and 3 more authors
In 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
@inproceedings{Zhou2025,author={Zhou, Bei and Zarrouki, Baha and Piccinini, Mattia and Hu, Cheng and Xie, Lei and Betz, Johannes},booktitle={2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},title={Safe Reinforcement Learning with a Predictive Safety Filter for Motion Planning and Control: A Drifting Vehicle Example},year={2025},volume={},number={},pages={4196-4203},doi={10.1109/IROS60139.2025.11246272},dimensions={true},}
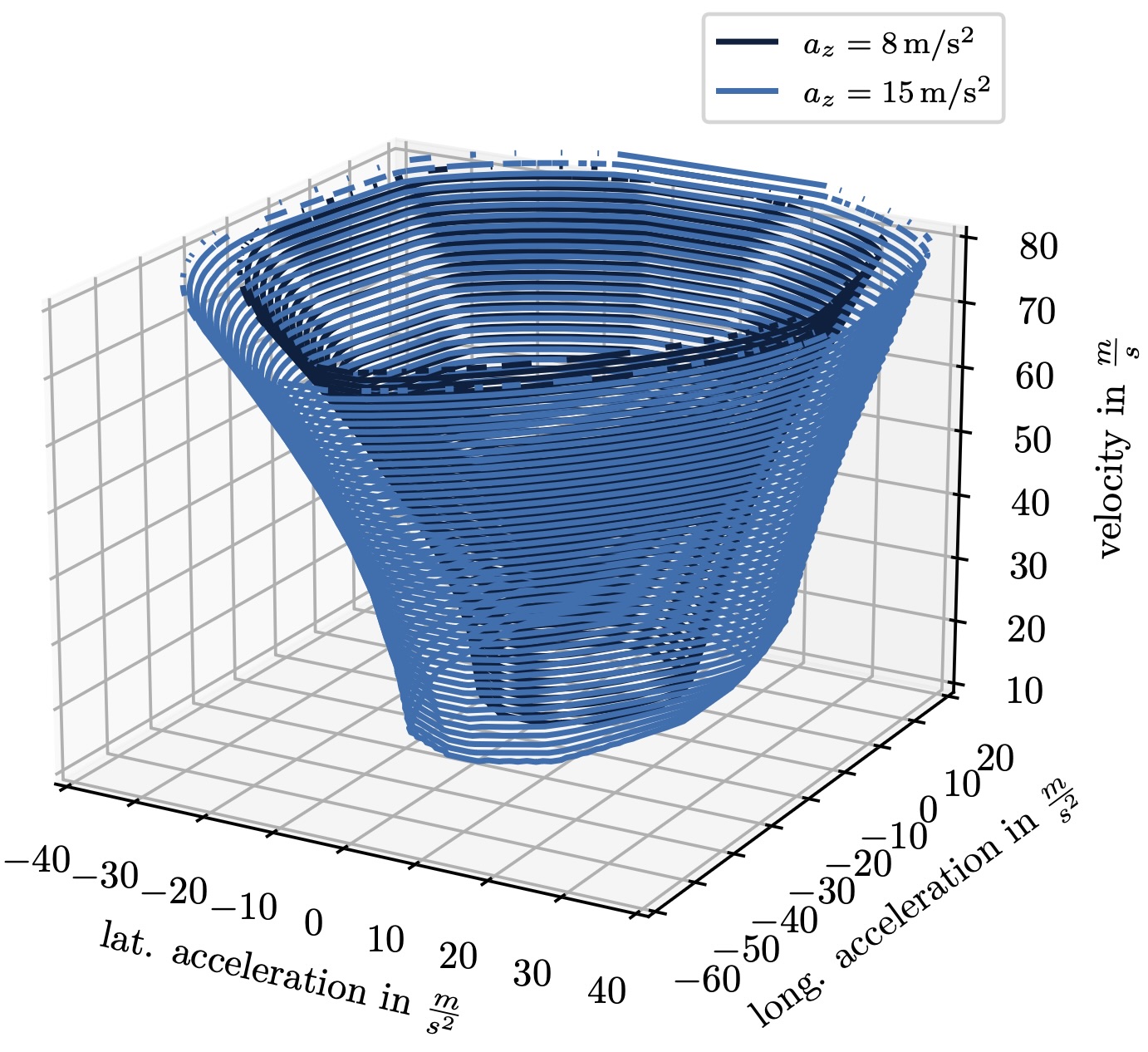
A Quasi-Steady-State Black Box Simulation Approach for the Generation of g-g-g-v Diagrams
Frederik Werner, Simon Sagmeister, Mattia Piccinini, and 1 more author
In 2025 IEEE Intelligent Vehicles Symposium (IV), 2025
@inproceedings{Werner2025,author={Werner, Frederik and Sagmeister, Simon and Piccinini, Mattia and Betz, Johannes},booktitle={2025 IEEE Intelligent Vehicles Symposium (IV)},title={A Quasi-Steady-State Black Box Simulation Approach for the Generation of g-g-g-v Diagrams},year={2025},volume={},number={},pages={2503-2509},doi={10.1109/IV64158.2025.11097491},dimensions={true},}
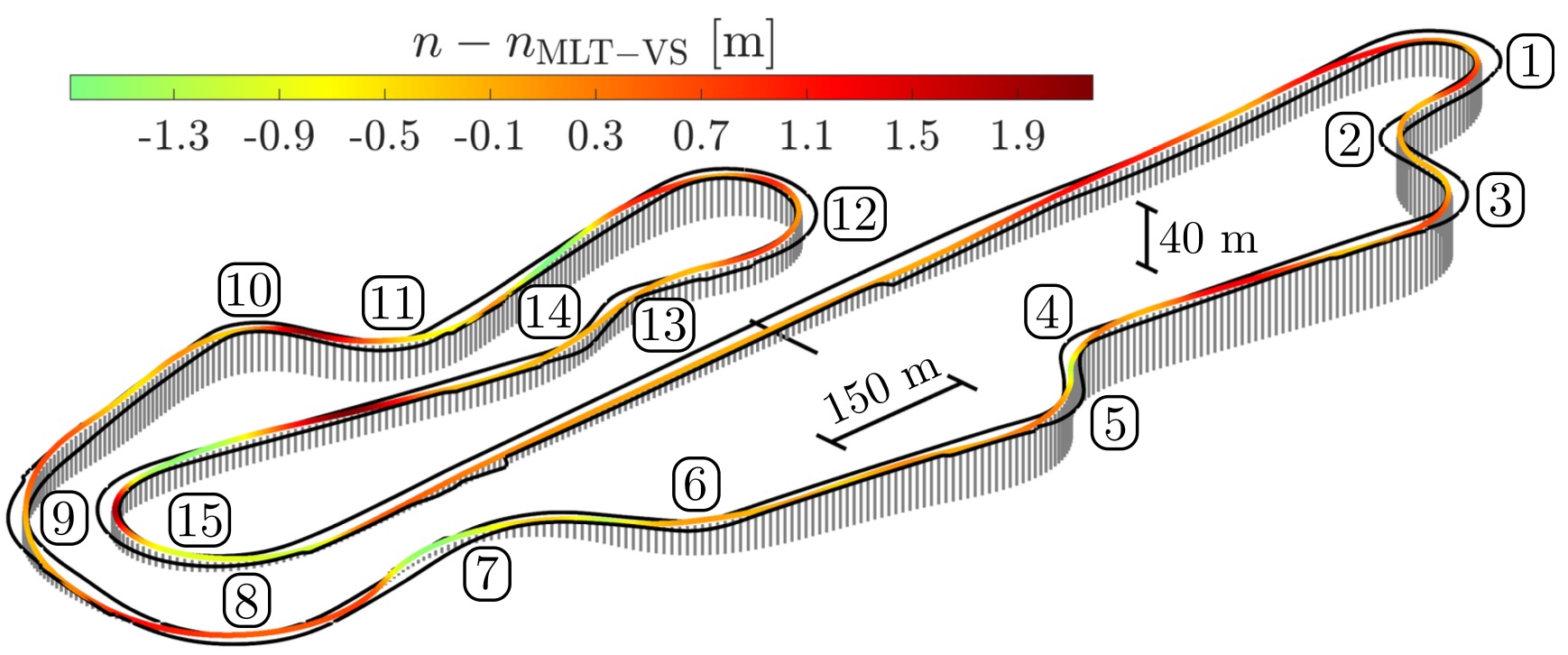
Kineto-Dynamical Planning and Accurate Execution of Minimum-Time Maneuvers on Three-Dimensional Circuits
Mattia Piccinini, Sebastiano Taddei, Johannes Betz, and 1 more author
In 2025 IEEE International Conference on Robotics and Automation (ICRA), 2025
@inproceedings{PiccininiICRA2025,author={Piccinini, Mattia and Taddei, Sebastiano and Betz, Johannes and Biral, Francesco},booktitle={2025 IEEE International Conference on Robotics and Automation (ICRA)},title={Kineto-Dynamical Planning and Accurate Execution of Minimum-Time Maneuvers on Three-Dimensional Circuits},year={2025},volume={},number={},pages={1-7},doi={10.1109/ICRA55743.2025.11127446},dimensions={true},}
Biasing the Driving Style of an Artificial Race Driver for Online Time-Optimal Maneuver Planning
Sebastiano Taddei, Mattia Piccinini, and Francesco Biral
In 2025 IEEE Intelligent Vehicles Symposium (IV), 2025
@inproceedings{Taddei2025,author={Taddei, Sebastiano and Piccinini, Mattia and Biral, Francesco},booktitle={2025 IEEE Intelligent Vehicles Symposium (IV)},title={Biasing the Driving Style of an Artificial Race Driver for Online Time-Optimal Maneuver Planning},year={2025},volume={},number={},pages={640-647},doi={10.1109/IV64158.2025.11097381},dimensions={true},}
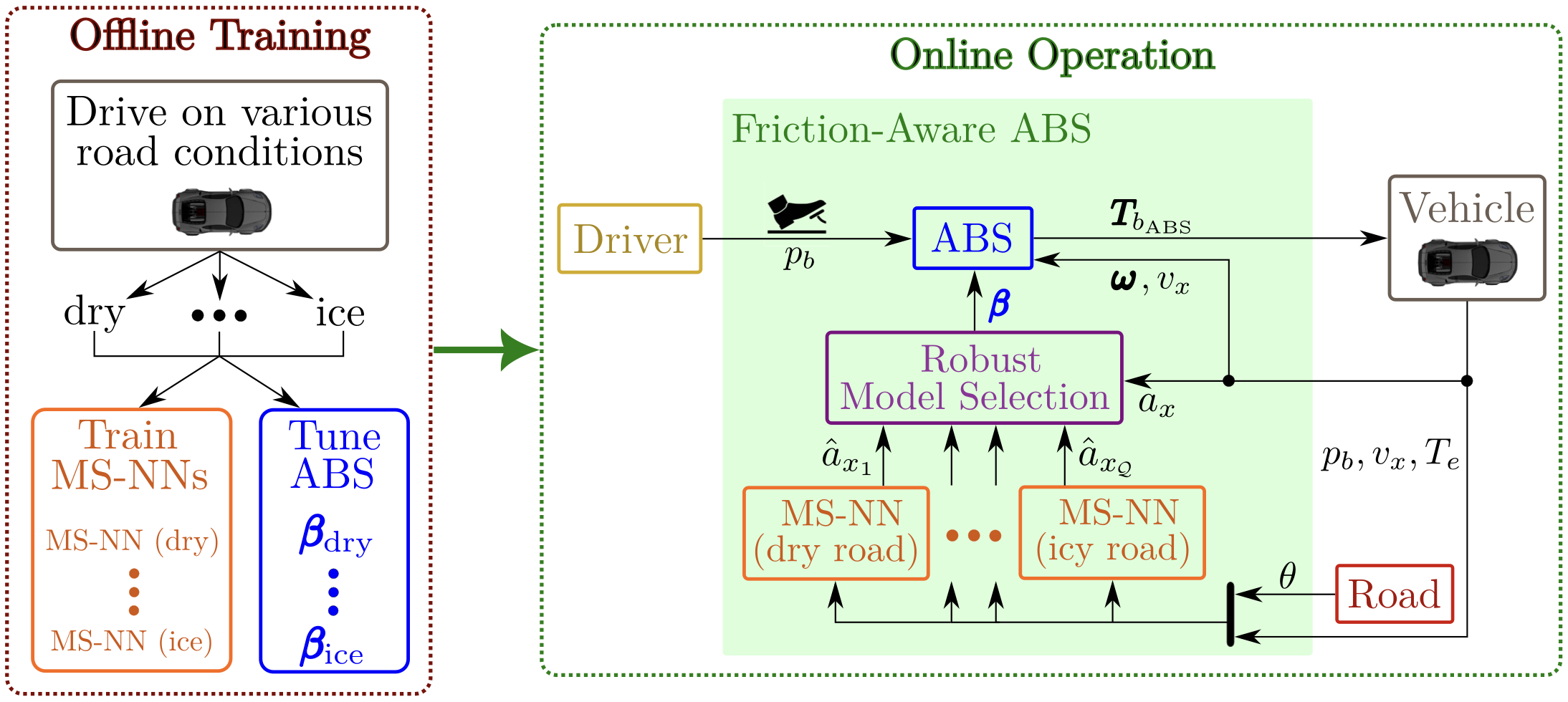
A Road Friction-Aware Anti-Lock Braking System Based on Model-Structured Neural Networks
Mattia Piccinini, Matteo Zumerle, Johannes Betz, and 1 more author
IEEE Open Journal of Intelligent Transportation Systems, 2025
@article{PiccininiABS2025,author={Piccinini, Mattia and Zumerle, Matteo and Betz, Johannes and Pietro Rosati Papini, Gastone},journal={IEEE Open Journal of Intelligent Transportation Systems},title={A Road Friction-Aware Anti-Lock Braking System Based on Model-Structured Neural Networks},year={2025},volume={6},number={},pages={522-536},doi={10.1109/OJITS.2025.3563347},dimensions={true},}
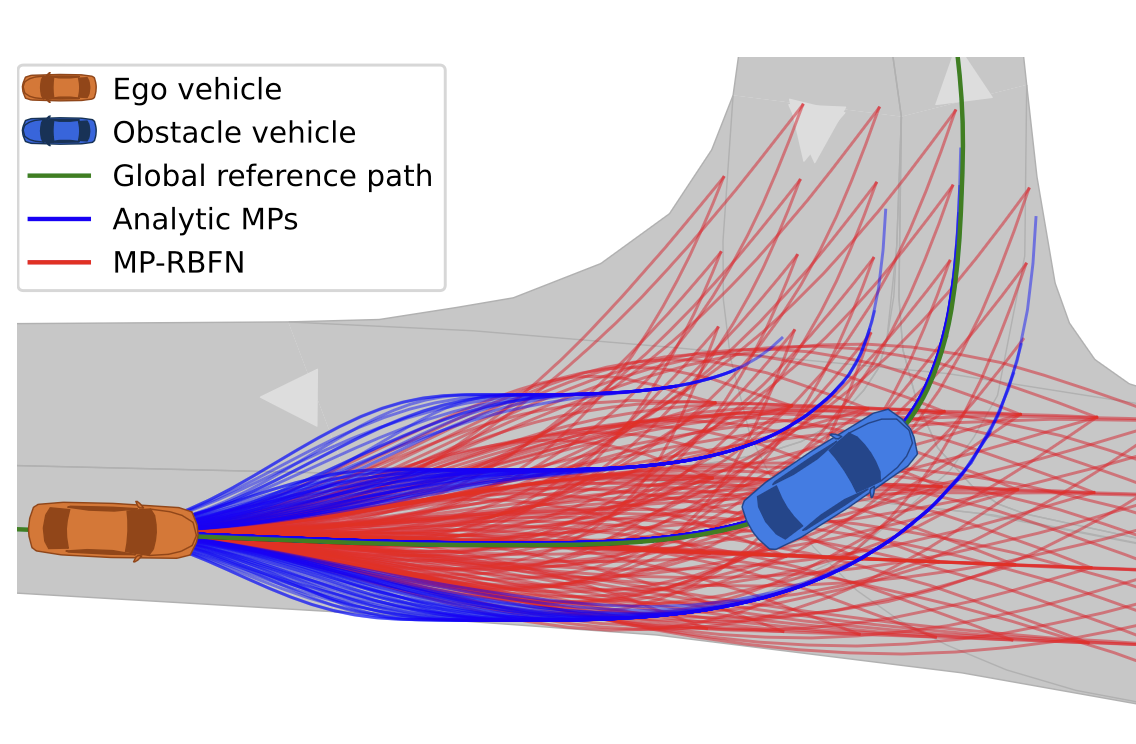
MP-RBFN: Learning-Based Vehicle Motion Primitives Using Radial Basis Function Networks
Marc Kaufeld, Mattia Piccinini, and Johannes Betz
In 2025 IEEE 28th International Conference on Intelligent Transportation Systems (ITSC), 2025
@inproceedings{Kaufeld2025,author={Kaufeld, Marc and Piccinini, Mattia and Betz, Johannes},booktitle={2025 IEEE 28th International Conference on Intelligent Transportation Systems (ITSC)},title={MP-RBFN: Learning-Based Vehicle Motion Primitives Using Radial Basis Function Networks},year={2025},volume={},number={},pages={1262-1269},keywords={Accuracy;Trajectory planning;Shape;Optimal control;Radial basis function networks;Trajectory;Planning;Vehicle dynamics;Autonomous vehicles;Optimization;Autonomous vehicles;trajectory planning;motion primitives;radial basis functions;differentiable planning},doi={10.1109/ITSC60802.2025.11423753},}
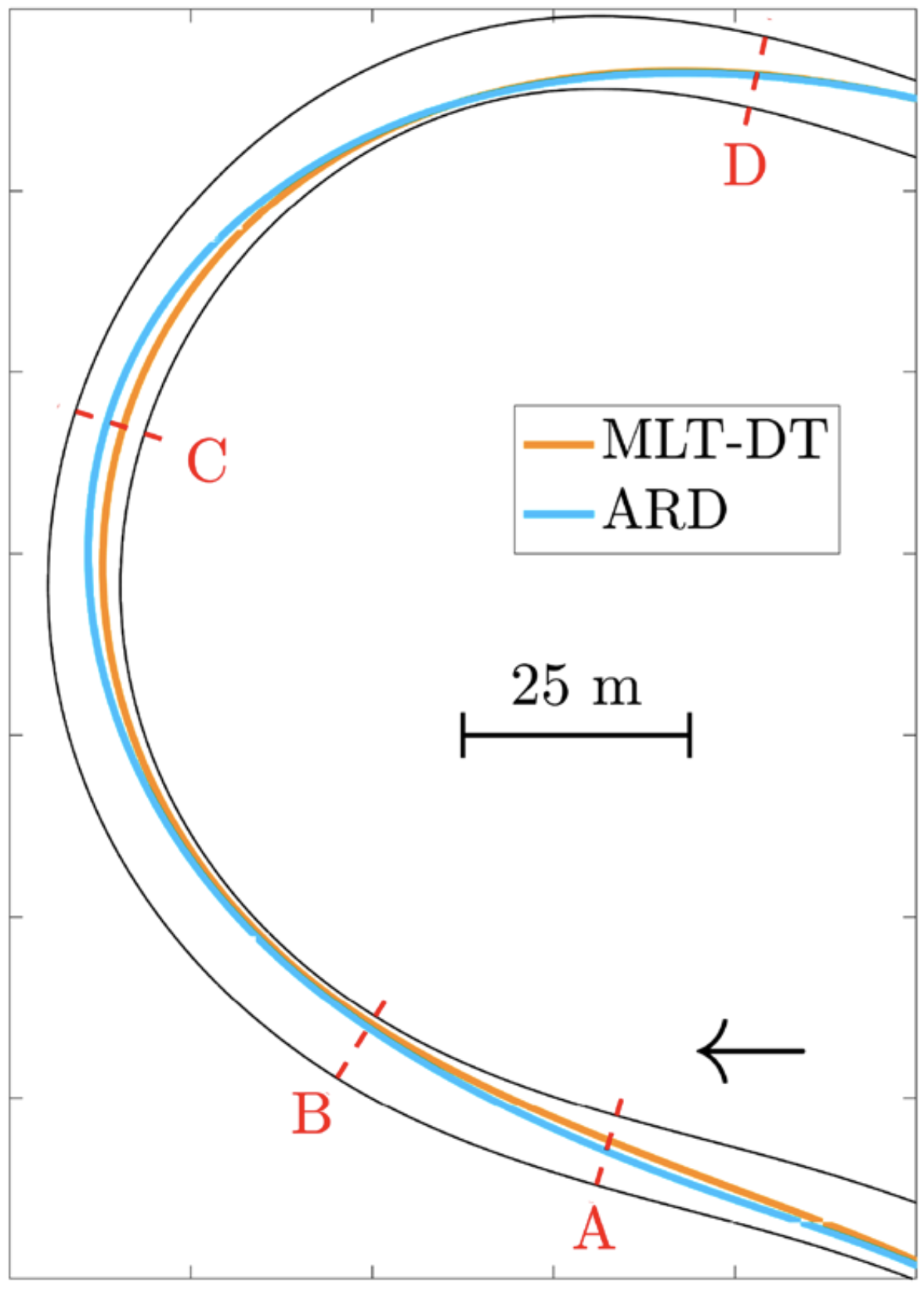
How optimal is the minimum-time manoeuvre of an artificial race driver?
Mattia Piccinini, Sebastiano Taddei, Edoardo Pagot, and 2 more authors
@article{PiccininiARD2024,author={Piccinini, Mattia and Taddei, Sebastiano and Pagot, Edoardo and Bertolazzi, Enrico and Biral, Francesco},title={How optimal is the minimum-time manoeuvre of an artificial race driver?},journal={Vehicle System Dynamics},volume={63},number={12},pages={2213--2240},year={2025},publisher={Taylor \& Francis},doi={10.1080/00423114.2024.2407176},dimensions={true},}
Model-Structured Neural Networks to Control the Steering Dynamics of Autonomous Race Cars
Mattia Piccinini, Aniello Mungiello, Georg Jank, and 3 more authors
In 2025 IEEE 28th International Conference on Intelligent Transportation Systems (ITSC), 2025
@inproceedings{Piccinini_A2RL_2025,author={Piccinini, Mattia and Mungiello, Aniello and Jank, Georg and Papini, Gastone Pietro Rosati and Biral, Francesco and Betz, Johannes},booktitle={2025 IEEE 28th International Conference on Intelligent Transportation Systems (ITSC)},title={Model-Structured Neural Networks to Control the Steering Dynamics of Autonomous Race Cars},year={2025},volume={},number={},pages={4129-4136},doi={10.1109/ITSC60802.2025.11423721},}
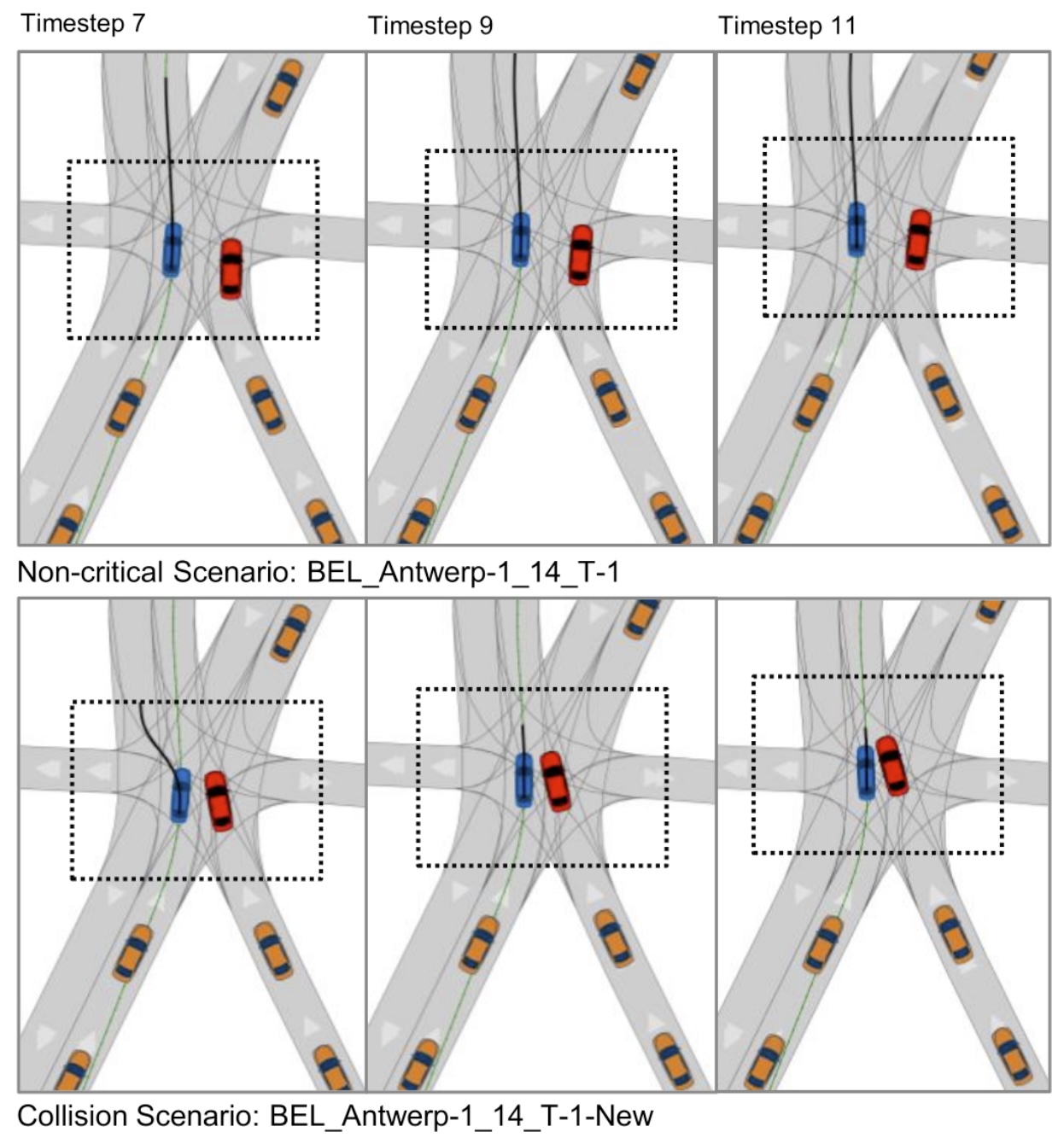
From Words to Collisions: LLM-Guided Evaluation and Adversarial Generation of Safety-Critical Driving Scenarios
Yuan Gao, Mattia Piccinini, Korbinian Moller, and 2 more authors
In 2025 IEEE 28th International Conference on Intelligent Transportation Systems (ITSC), 2025
@inproceedings{Gao2025,author={Gao, Yuan and Piccinini, Mattia and Moller, Korbinian and Alanwar, Amr and Betz, Johannes},booktitle={2025 IEEE 28th International Conference on Intelligent Transportation Systems (ITSC)},title={From Words to Collisions: LLM-Guided Evaluation and Adversarial Generation of Safety-Critical Driving Scenarios},year={2025},volume={},number={},pages={2134-2141},doi={10.1109/ITSC60802.2025.11423486},}
2024
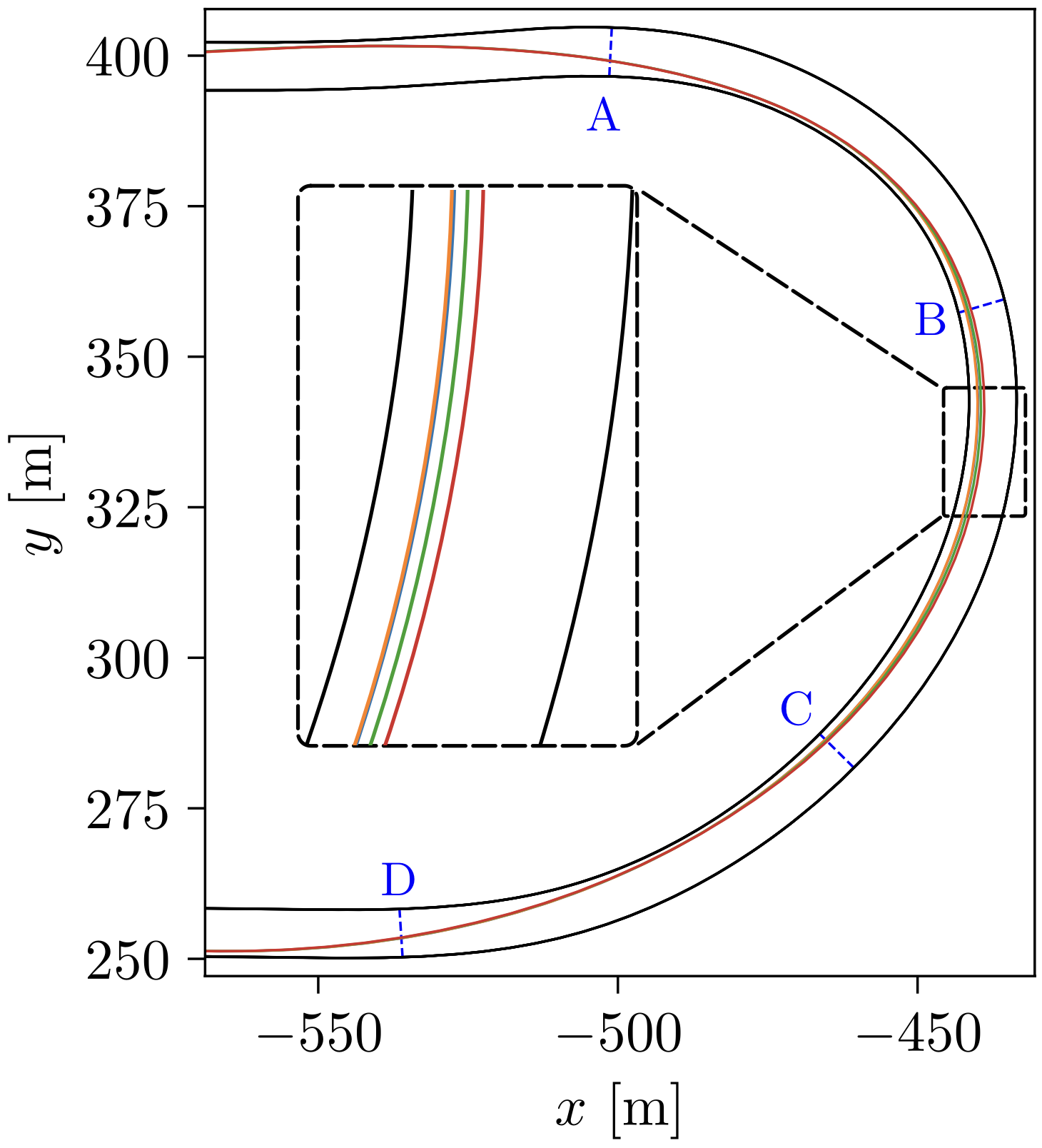
Computationally Efficient Minimum-Time Motion Primitives for Vehicle Trajectory Planning
Mattia Piccinini, Simon Gottschalk, Matthias Gerdts, and 1 more author
IEEE Open Journal of Intelligent Transportation Systems, 2024
@article{Piccinini2024PathPolyNN,author={Piccinini, Mattia and Gottschalk, Simon and Gerdts, Matthias and Biral, Francesco},journal={IEEE Open Journal of Intelligent Transportation Systems},title={Computationally Efficient Minimum-Time Motion Primitives for Vehicle Trajectory Planning},year={2024},volume={5},number={},pages={642-655},doi={10.1109/OJITS.2024.3476540},dimensions={true},}
Reinforcement Learning and Optimal Control: A Hybrid Collision Avoidance Approach
Simon Gottschalk, Matthias Gerdts, and Mattia. Piccinini
@conference{Gottschalk2024,author={Gottschalk, Simon and Gerdts, Matthias and Piccinini, Mattia.},title={Reinforcement Learning and Optimal Control: A Hybrid Collision Avoidance Approach},booktitle={Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems - VEHITS},year={2024},pages={76-87},publisher={SciTePress},organization={INSTICC},doi={10.5220/0012569800003702},isbn={978-989-758-703-0},issn={2184-495X},dimensions={true},}
MPTree: A Sampling-based Vehicle Motion Planner for Real-time Obstacle Avoidance
Mattia Piazza, Mattia Piccinini, Sebastiano Taddei, and 1 more author
In , 2024
17th IFAC Symposium on Control of Transportation Systems CTS 2024
@inproceedings{Piazza2024IFAC,title={MPTree: A Sampling-based Vehicle Motion Planner for Real-time Obstacle Avoidance},journal={IFAC-PapersOnLine},volume={58},number={10},pages={146-153},year={2024},note={17th IFAC Symposium on Control of Transportation Systems CTS 2024},issn={2405-8963},doi={https://doi.org/10.1016/j.ifacol.2024.07.332},author={Piazza, Mattia and Piccinini, Mattia and Taddei, Sebastiano and Biral, Francesco},}
Impacts of g-g-v Constraints Formulations on Online Minimum-Time Vehicle Trajectory Planning
Mattia Piccinini, Sebastiano Taddei, Mattia Piazza, and 1 more author
In , 2024
17th IFAC Symposium on Control of Transportation Systems CTS 2024
@inproceedings{Piccinini2024IFAC,title={Impacts of g-g-v Constraints Formulations on Online Minimum-Time Vehicle Trajectory Planning},journal={IFAC-PapersOnLine},volume={58},number={10},pages={87-93},year={2024},note={17th IFAC Symposium on Control of Transportation Systems CTS 2024},issn={2405-8963},doi={https://doi.org/10.1016/j.ifacol.2024.07.323},author={Piccinini, Mattia and Taddei, Sebastiano and Piazza, Mattia and Biral, Francesco},}
2023
A Physics-Driven Artificial Agent for Online Time-Optimal Vehicle Motion Planning and Control
Mattia Piccinini, Sebastiano Taddei, Matteo Larcher, and 2 more authors
@article{Piccinini2023b,author={Piccinini, Mattia and Taddei, Sebastiano and Larcher, Matteo and Piazza, Mattia and Biral, Francesco},journal={IEEE Access},title={A Physics-Driven Artificial Agent for Online Time-Optimal Vehicle Motion Planning and Control},year={2023},volume={11},number={},pages={46344-46372},doi={10.1109/ACCESS.2023.3274836},url={https://ieeexplore.ieee.org/document/10122539},dimensions={true},}
Robust and Sample-Efficient Estimation of Vehicle Lateral Velocity Using Neural Networks With Explainable Structure Informed by Kinematic Principles
Mauro Da Lio, Mattia Piccinini, and Francesco Biral
IEEE Transactions on Intelligent Transportation Systems, 2023
@article{DaLio2023,author={Lio, Mauro Da and Piccinini, Mattia and Biral, Francesco},journal={IEEE Transactions on Intelligent Transportation Systems},title={Robust and Sample-Efficient Estimation of Vehicle Lateral Velocity Using Neural Networks With Explainable Structure Informed by Kinematic Principles},year={2023},volume={},number={},pages={1-15},doi={10.1109/TITS.2023.3303776},dimensions={true},}
A predictive neural hierarchical framework for on-line time-optimal motion planning and control of black-box vehicle models
Mattia Piccinini, Matteo Larcher, Edoardo Pagot, and 3 more authors
@article{Piccinini2023,author={Piccinini, Mattia and Larcher, Matteo and Pagot, Edoardo and Piscini, Davide and Pasquato, Leone and Biral, Francesco},title={A predictive neural hierarchical framework for on-line time-optimal motion planning and control of black-box vehicle models},journal={Vehicle System Dynamics},volume={61},number={1},pages={83-110},year={2023},publisher={Taylor & Francis},doi={10.1080/00423114.2022.2035776},url={https://doi.org/10.1080/00423114.2022.2035776
},eprint={https://doi.org/10.1080/00423114.2022.2035776
},dimensions={true},}
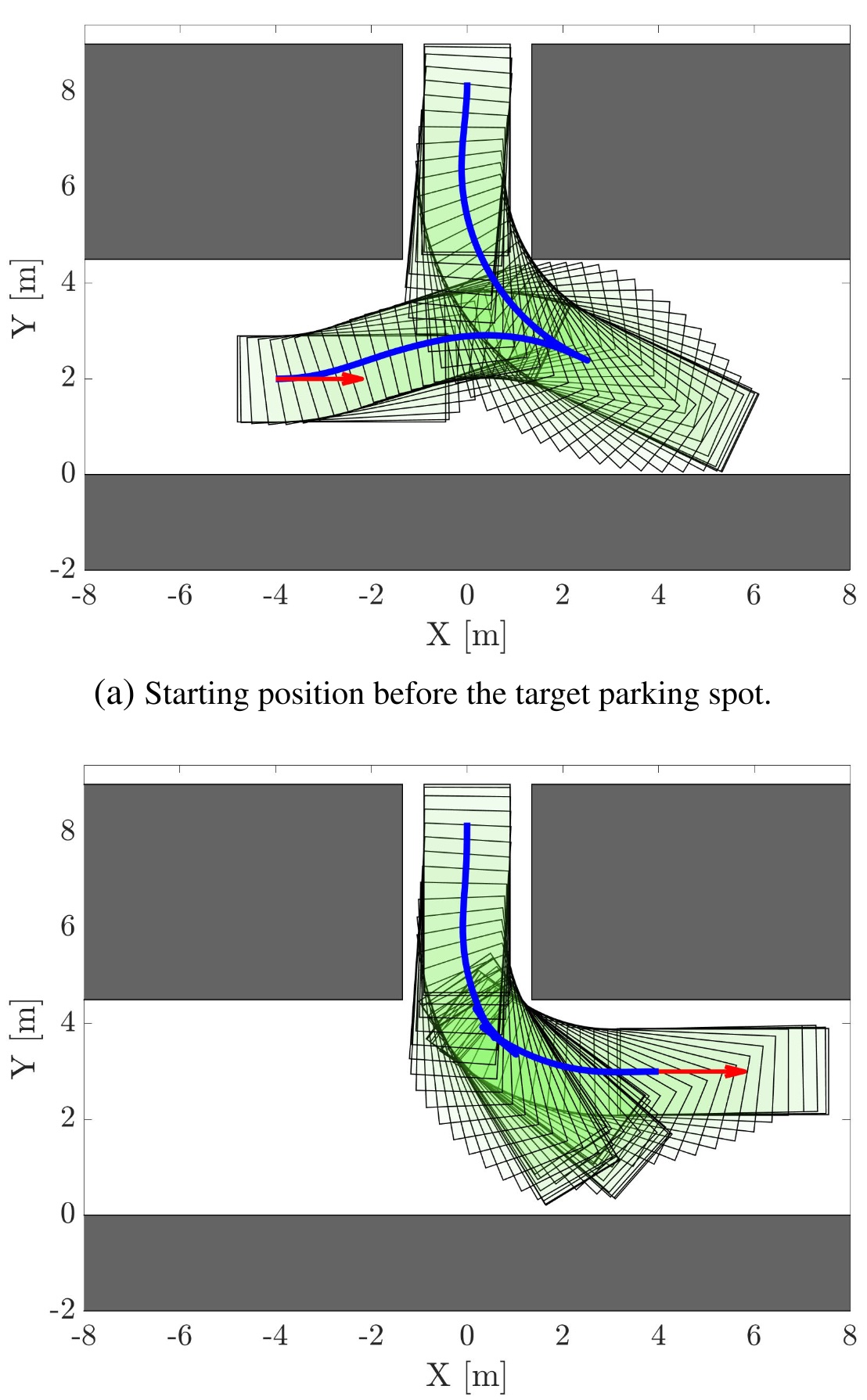
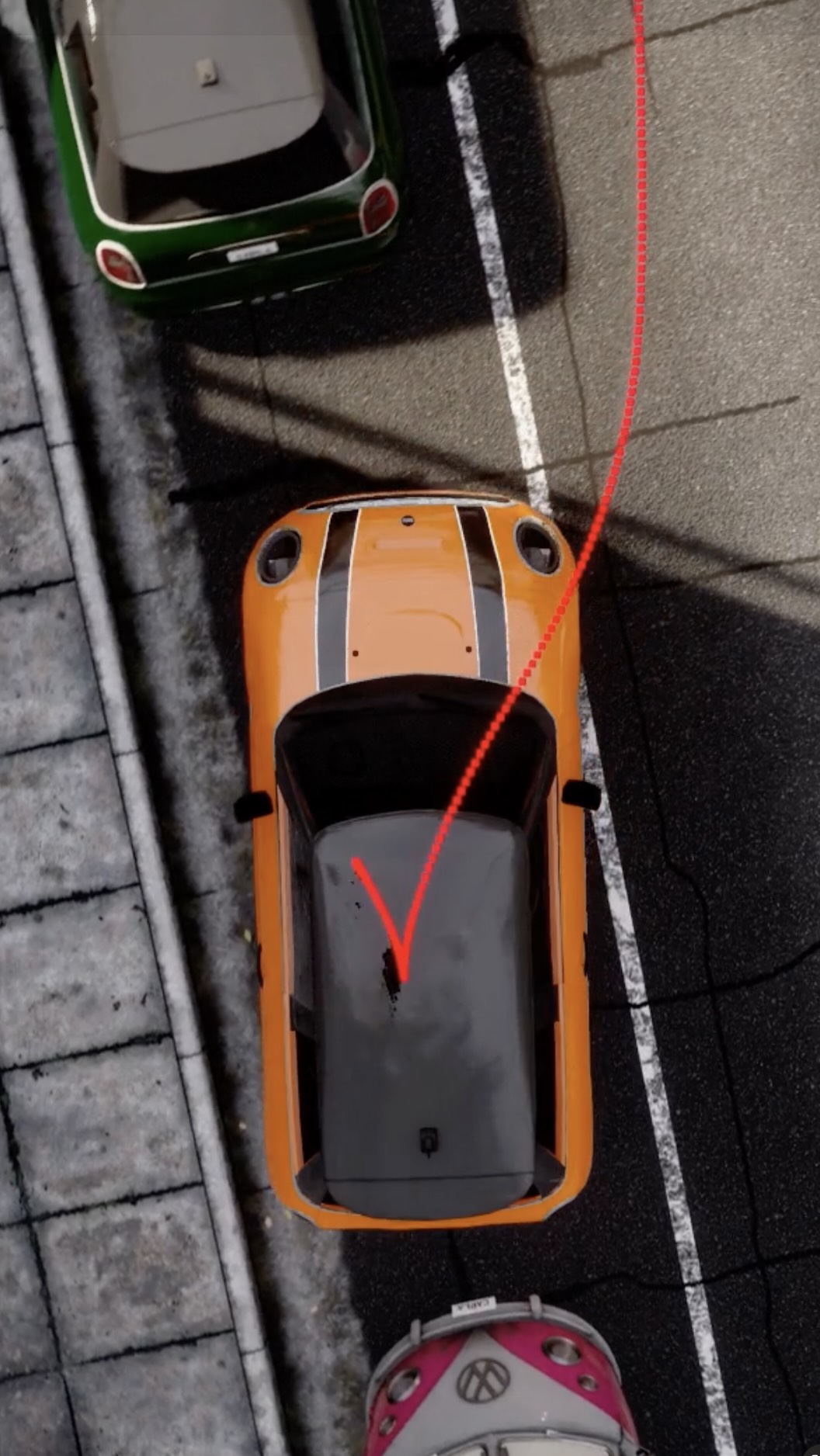
Fast Planning and Tracking of Complex Autonomous Parking Maneuvers With Optimal Control and Pseudo-Neural Networks
Edoardo Pagot, Mattia Piccinini, Enrico Bertolazzi, and 1 more author
@article{Pagot2023,author={Pagot, Edoardo and Piccinini, Mattia and Bertolazzi, Enrico and Biral, Francesco},journal={IEEE Access},title={Fast Planning and Tracking of Complex Autonomous Parking Maneuvers With Optimal Control and Pseudo-Neural Networks},year={2023},volume={11},number={},pages={124163-124180},doi={10.1109/ACCESS.2023.3330431},dimensions={true},}
Device and method, based on neural networks, for estimating the lateral speed of vehicles
Mauro Da Lio, Francesco Biral, and Mattia Piccinini
@misc{DaLio2023b,author={Lio, Mauro Da and Biral, Francesco and Piccinini, Mattia},year={2023},url={https://patents.google.com/patent/WO2023166536A1/en?oq=PCT%2fIT2023%2f050058},note={Patent WO2023166536A1},title={Device and method, based on neural networks, for estimating the lateral speed of vehicles},}
2022
Real-time Autonomous Parking in Unstructured Scenarios with an Indirect Optimal Control Approach
Edoardo Pagot, Mattia Piccinini, Alice Plebe, and 2 more authors
In Workshop Behavior-Driven Autonomous Driving in Unstructured Environments (BADUE), IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
@incollection{Pagot2022,author={Pagot, Edoardo and Piccinini, Mattia and Plebe, Alice and Bertolazzi, Enrico and Biral, Francesco},booktitle={Workshop Behavior-Driven Autonomous Driving in Unstructured Environments (BADUE), IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},year={2022},title={Real-time Autonomous Parking in Unstructured Scenarios with an Indirect Optimal Control Approach},url={https://obj.umiacs.umd.edu/badue-accepted/8.pdf},}
2020
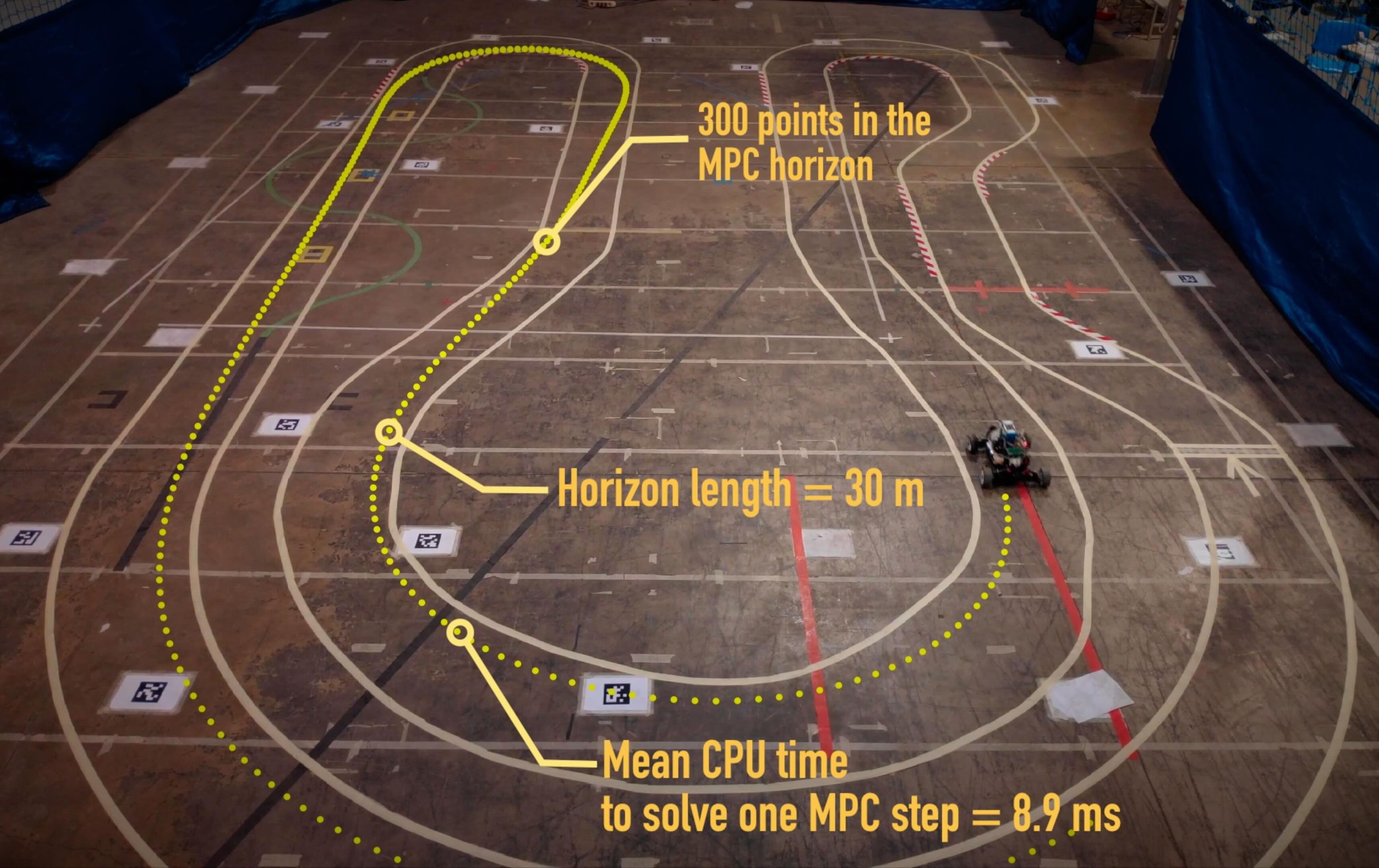
Real-time optimal control of an autonomous RC car with minimum-time maneuvers and a novel kineto-dynamical model
Edoardo Pagot, Mattia Piccinini, and Francesco Biral
In 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
@inproceedings{Pagot2020,author={Pagot, Edoardo and Piccinini, Mattia and Biral, Francesco},booktitle={2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},title={Real-time optimal control of an autonomous RC car with minimum-time maneuvers and a novel kineto-dynamical model},year={2020},volume={},number={},pages={2390-2396},doi={10.1109/IROS45743.2020.9340640},dimensions={true}}
 A Multi-Stage Time-Variant Motion Planner for Agile Autonomous Driving ManeuversIEEE Open Journal of Intelligent Transportation Systems, 2026under review
A Multi-Stage Time-Variant Motion Planner for Agile Autonomous Driving ManeuversIEEE Open Journal of Intelligent Transportation Systems, 2026under review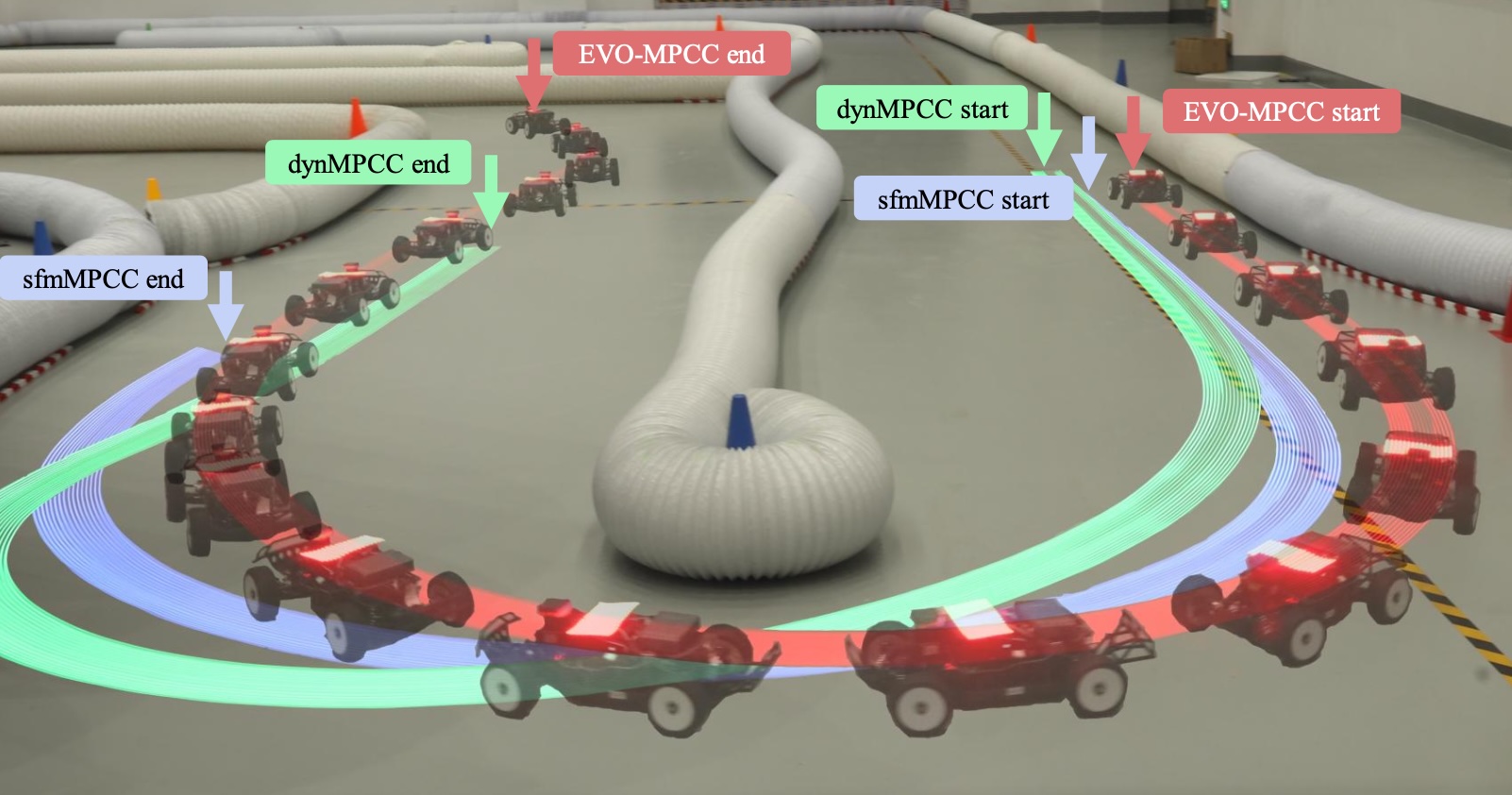 EVO-MPCC: Enhanced Velocity Optimizationwith Learning-Based Auto-Tuning for Real-Time Vehicle Trajectory PlanningRobotics and Autonomous Systems, 2026under review
EVO-MPCC: Enhanced Velocity Optimizationwith Learning-Based Auto-Tuning for Real-Time Vehicle Trajectory PlanningRobotics and Autonomous Systems, 2026under review Model-Structured Neural Networks for Vehicle Dynamics Learning Near the LimitsIEEE Open Journal of Intelligent Transportation Systems, 2026under review
Model-Structured Neural Networks for Vehicle Dynamics Learning Near the LimitsIEEE Open Journal of Intelligent Transportation Systems, 2026under review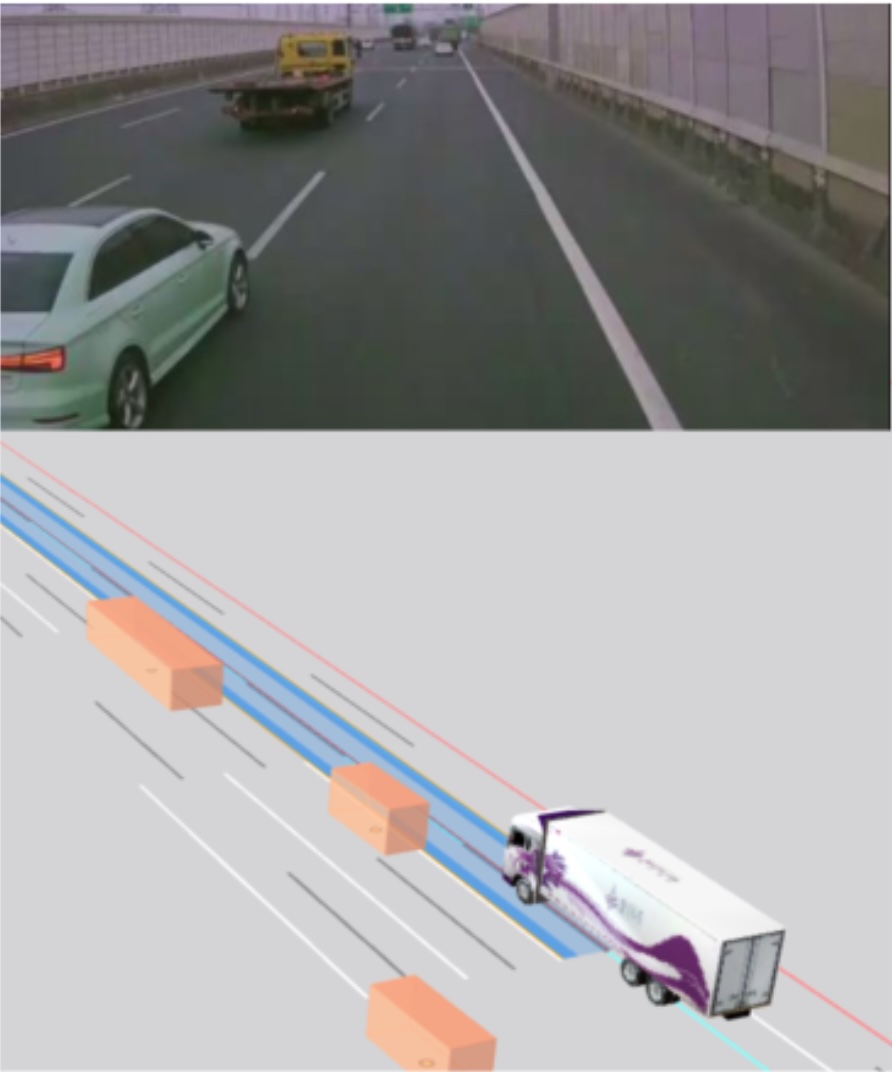 Extrospective Prediction for Autonomous Driving in Emergency Cut-in ScenariosIEEE Transactions on Intelligent Transportation Systems, 2026under review
Extrospective Prediction for Autonomous Driving in Emergency Cut-in ScenariosIEEE Transactions on Intelligent Transportation Systems, 2026under review Multidirectional Gaussian-Process Tire Models for Kalman Filtering in Vehicle Dynamics State EstimationVehicle System Dynamics, 2026under review
Multidirectional Gaussian-Process Tire Models for Kalman Filtering in Vehicle Dynamics State EstimationVehicle System Dynamics, 2026under review
 Device and method, based on neural networks, for estimating the lateral speed of vehicles2023Patent WO2023166536A1
Device and method, based on neural networks, for estimating the lateral speed of vehicles2023Patent WO2023166536A1